LaTeX templates and examples — Two-column
Recent
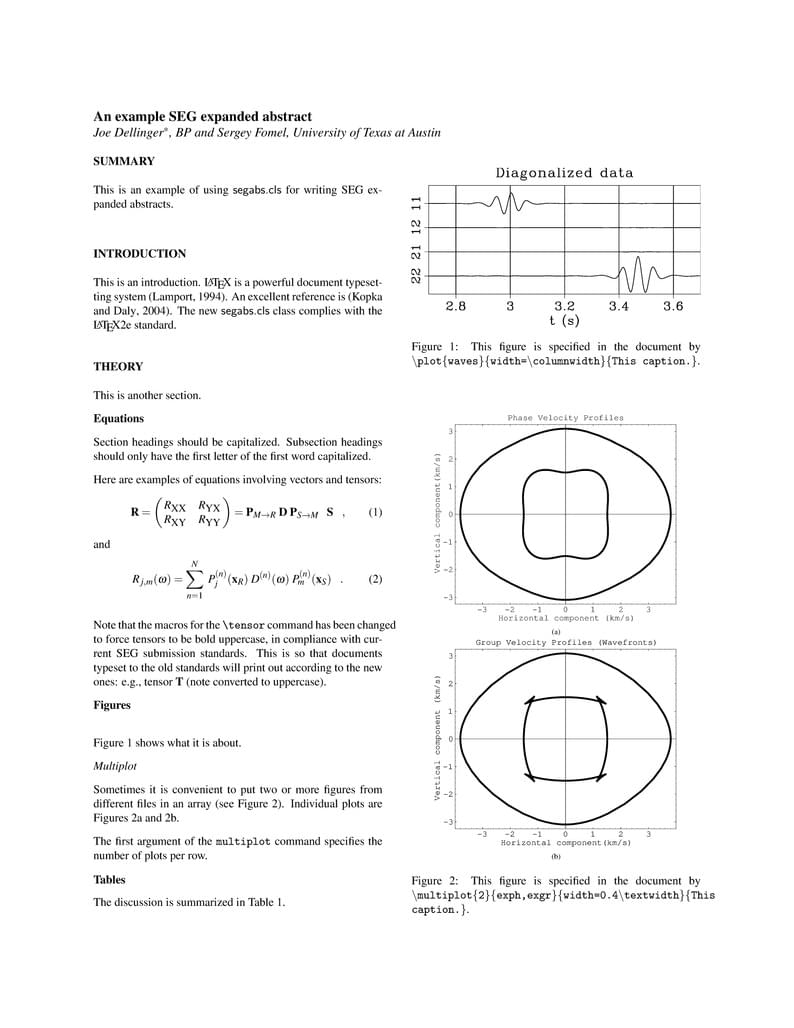
Template for writing SEG abstract.
Template for the Brazilian Symposium on Computer Music 2019

A simple template used for teaching.
システム制御情報研究発表講演会(SCI)用スタイルファイル
This study aims to analyze what altmetric factors affect the success of a Kickstarter campaign. This project was created by two high school students for the Big Data Challenge.

LaTeX template for 2019 ACM/IEEE Symposium on Architectures for Networking and Communications Systems (ANCS).
Template for use in the University of Iowa course MATH:3900 Introduction to Math Research.
This document is an official template for The International Conference on Mechatronics.

Template for the Volcanica journal, downloaded from the Author guidelines page on 12 Dec, 2017.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.