overleaf template galleryCommunity articles — Recent
Papers, presentations, reports and more, written in LaTeX and published by our community.

A simple proofs essay using basic theorems while trying to get a grasp on LaTeX
Suresh Balsubramani's CV. Created with the AltaCV template.
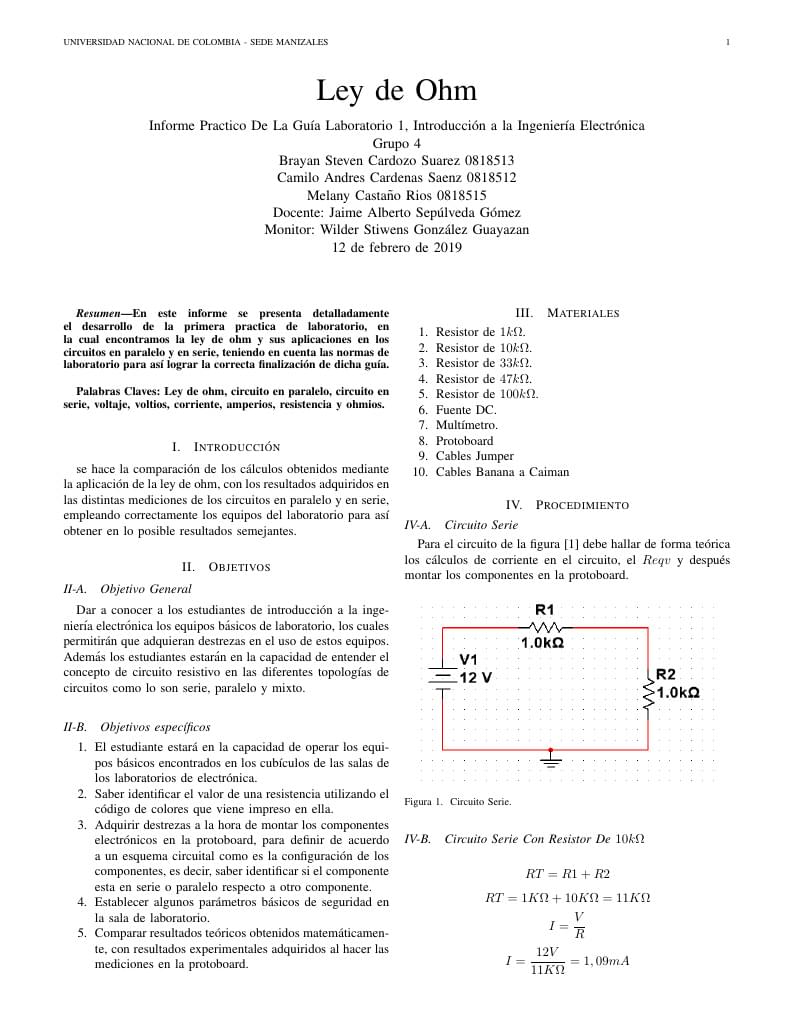
En este informe se presenta detalladamente el desarrollo de la primera practica de laboratorio, en la cual encontramos la ley de ohm y sus aplicaciones en los circuitos en paralelo y en serie, teniendo en cuenta las normas de laboratorio para así lograr la correcta finalización de dicha guía.
Created using the Classicthesis-Styled CV LaTeX Template Version 1.0 (22/2/13) from LaTeXTemplates.com, originally by Alessandro Plasmati

This presentation is all about LaTeX Programming Language. If you are new to LaTeX or want to refresh you with some skills on LaTeX then, this one is for you! This presentation is publicize after i presented it at St. Xavier's College. Kathmandu, Nepal. Git Source: https://damicristi.github.io/LaTeX/ Foremost thanks to Swastika, She knows why!
O presente texto contempla a Terceira Atividade de SCCUbi 01/2015, onde foi proposto que cada aluno respondesse nove perguntas elaboradas por seus pares a partir do capítulo "Caracterização de Sistemas Distribuídos" do livro "Sistemas Distribuídos, Conceitos e Projeto" . Este texto foi produzido com o Overleaf.
Solving Brachistochrone Problem

Sinds enkele jaren ben ik op zoek naar eenvoudige wiskundige en fysische problemen die onverwacht gerelateerd zijn met het getal \(\pi\). In The bouncing balls and pi beschreef ik eerder al hoe de opeenvolgende decimalen van \(\pi\) kunnen berekend worden door twee ballen volledig elastisch tegen elkaar en tegen een muur te laten botsen. In dit artikel zal ik aantonen hoe het getal \(\pi\) tevoorschijn komt door een oneindige serie rechthoeken met oppervlakte 1 spiraalsgewijze aan elkaar te kleven. In een veralgemening van dit probleem duikt op een natuurlijke wijze de gammafunctie en de formule van Stirling op.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.